<
>

萨福企业RC系列机器人切管机为多轴联动的切割机床,主要由行走轨道、机器人底座、机身、管材加持系统、机器人关节本体、火焰/等离子切割系统、切割头组成。按照行业应用不同,可设计为坐式机器人和龙门吊架式机器人两种。将机器人关节安装在可以纵向移动的行走轨道上,使机器人整体作平面Y方向移动,切割机器人关节可进行各种复杂的空间运动。增加一个外部旋转轴,使管材进行360度旋转,从而实现对各种管材等工件进行空间直线、斜线、曲线的多种切割,并可开槽、流水孔、安装孔及焊接坡口等。RC系列圆管机器人切管机搭载先进的精细等离子切割技术,也可以采用火焰切割,采用离线或示教编程技术,具有可视操作界面,软件中储存了各种切割模块和参数,操作简单易懂。被切割工件采用自定心卡盘夹持放置,工件长度可达到6-12M以上。
一、3维机器人等离子切割机产品简介
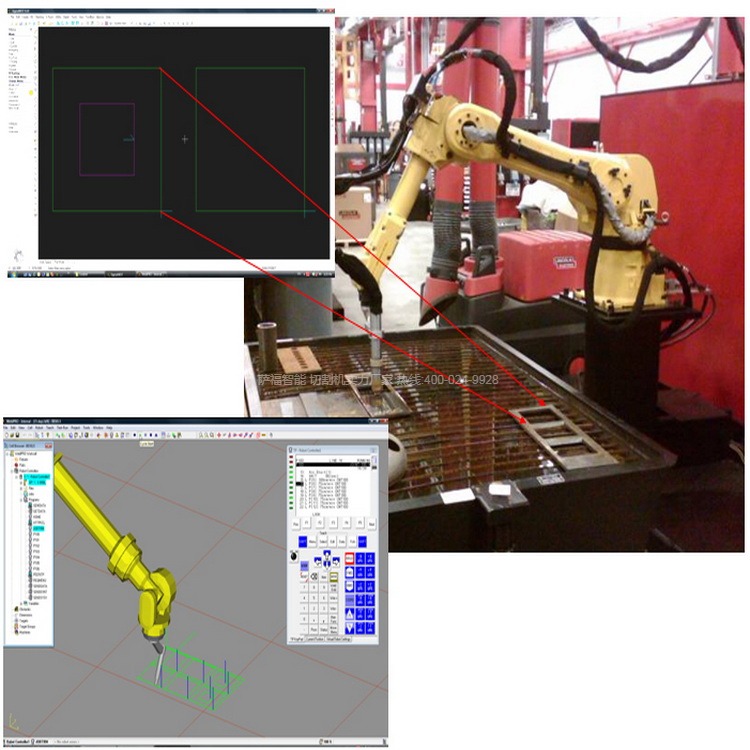
1、3维机器人等离子切割机为多轴联动的坡口切割系统,主要由机器人底座、机身、机器人关节本体、等离子切割系统、坡口切割头组成。
2、按照使用场景和用途不同,可设计为坐式机器人和龙门吊架式机器人两种。
3、也可将机器人关节安装在可以纵向移动的行走轨道上,使机器人整体作平面Y方向移动,大大增加了机器人的加工范围。、
4、本机可设计成单工位或双工位方式,可大大提升产品的加工效率。
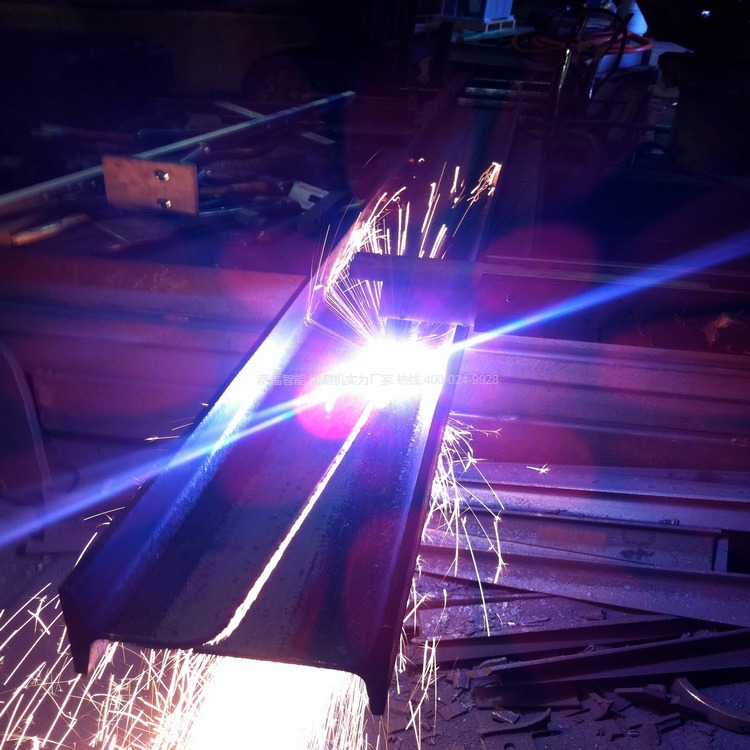
5、3维机器人等离子切割机主要对工程机械等行业中金属板材2次坡口的切割,包括直线、曲线V型、Y型、I型定坡口、变坡口等焊接坡口的切割。
6、3维机器人等离子切割机搭载了稳定的等离子坡口切割头,切口面可焊性较好。也可搭载等离子切割系统,具有更快的加工效率。
7、3维机器人等离子切割机采用示教编程工艺,也可采用离线编程技术,具有可视操作界面,软件中储存了各种切割程序模块和参数,操作简单易懂。
二、3维机器人等离子切割机技术参数
臂展半径:1600 2400 2600 4600;
机器人关节厂家:ABB、YASKAWA;
轴数:6轴+1以上;
工作尺寸:定制;
周边设备:①Y轴直线运动系统+Y axis linear motion system;②扩展X轴龙门架+Gantry X axis ;
机器人编程方式:示教Teaching playback/离线编程Off-line;
坡口工艺:I、V、Y ±600;;
定位精度:±0.05mm~±0.08mm;
工作方式:等离子切割 Plasma;
等离子电源:美国海宝American Hypertherm、美国飞马特 American Thermadyne、德国凯尔贝German Kjellberg、意大利圣宝莱Italy CBRON;
能源要求:380V/400V,50HZ,8-9.6Bar Air(等离子Plasma)、氧气燃气(Oxygen + acetylene, propane)。
管材切割机器人切割视频








一、3维机器人等离子切割机产品简介
1、3维机器人等离子切割机为多轴联动的坡口切割系统,主要由机器人底座、机身、机器人关节本体、等离子切割系统、坡口切割头组成。
2、按照使用场景和用途不同,可设计为坐式机器人和龙门吊架式机器人两种。
3、也可将机器人关节安装在可以纵向移动的行走轨道上,使机器人整体作平面Y方向移动,大大增加了机器人的加工范围。、
4、本机可设计成单工位或双工位方式,可大大提升产品的加工效率。
5、3维机器人等离子切割机主要对工程机械等行业中金属板材2次坡口的切割,包括直线、曲线V型、Y型、I型定坡口、变坡口等焊接坡口的切割。
6、3维机器人等离子切割机搭载了稳定的等离子坡口切割头,切口面可焊性较好。也可搭载等离子切割系统,具有更快的加工效率。
7、3维机器人等离子切割机采用示教编程工艺,也可采用离线编程技术,具有可视操作界面,软件中储存了各种切割程序模块和参数,操作简单易懂。
二、3维机器人等离子切割机技术参数
臂展半径:1600 2400 2600 4600;
机器人关节厂家:ABB、YASKAWA;
轴数:6轴+1以上;
工作尺寸:定制;
周边设备:①Y轴直线运动系统+Y axis linear motion system;②扩展X轴龙门架+Gantry X axis ;
机器人编程方式:示教Teaching playback/离线编程Off-line;
坡口工艺:I、V、Y ±600;;
定位精度:±0.05mm~±0.08mm;
工作方式:等离子切割 Plasma;
等离子电源:美国海宝American Hypertherm、美国飞马特 American Thermadyne、德国凯尔贝German Kjellberg、意大利圣宝莱Italy CBRON;
能源要求:380V/400V,50HZ,8-9.6Bar Air(等离子Plasma)、氧气燃气(Oxygen + acetylene, propane)。
管材切割机器人切割视频

